技術文章
技術問答
My Project
iT 徵才
聊天室
2026 鐵人賽
登入/註冊
文章
問答
Tag
邦友
鐵人賽
搜尋
2023 iThome 鐵人賽
DAY
8
0
AI & Data
YOLO系列網路技術採用以及實作
系列 第
8
篇
[DAY 8] YOLOv5-下篇
15th鐵人賽
Xian
2023-09-23 18:21:20
1324 瀏覽
分享至
補充
:
上篇中的YOLOv5架構圖中,有繪製到一個
CBL block
,這邊CBL包含了
convolution
、
Batch Normalization
以及
Leakly ReLu
激活函數。
其他技術採用:
影像擴增技術
:
Mosiac
:將四張圖併成一張。
Copy-Paste
:將其他的物件切割貼到另外一張圖片上。
Random Affine Transformations
:隨機將影像進行放大縮小、旋轉、shearing。
MixUp
:將多張圖片以線性的方式進行合併。
Albumentations
:多種augmentation的函式庫。
HSV
: 隨機變換影像的色相(Hue)、飽和度(Saturation)、值(Value)。
隨機水平翻轉
。
訓練策略
:
多尺度訓練
: 在模型訓練過程隨機將影像以原圖0.5到1.5倍放大。
AutoAnchor
: 個人覺得跟YOLOv2採用的Dimension Clusters一樣用以挑選最適合該資料集的Anchor Box。
Mixed precision訓練
:採用單精度訓練與混合精度訓練出來的準確度都差不多,但是對於複雜的模型,採用混合精度可以節省記憶體的使用以集提升運算速度。
同樣有採用
基因演算法取得最佳超參數
。
損失函數的設計:
Classes Loss:用來計算分類錯誤(採用Binary Cross Entropy Loss)。
Objectness Loss:物件是否在該Grid Cell當中(同樣採用Binary Cross Entropy Loss)。
分別對大、中以及小物件進行加權值計算loss:
權重固定: 大、中以及小物件分別為4、1以及0.4。
Location Loss: 計算物件的位置(C-IOU)。
求座標的方式:
YOLOv2、YOLOv3、YOLOv4:
YOLOv5:
中心點座標偏移量由(0,1)轉換至(-0.5,1.5),使偏移量比較容易得到0或是1的值。
原先的w,h求法有缺陷,因為該值會有無限大的狀況發生,會使梯度無法收斂。
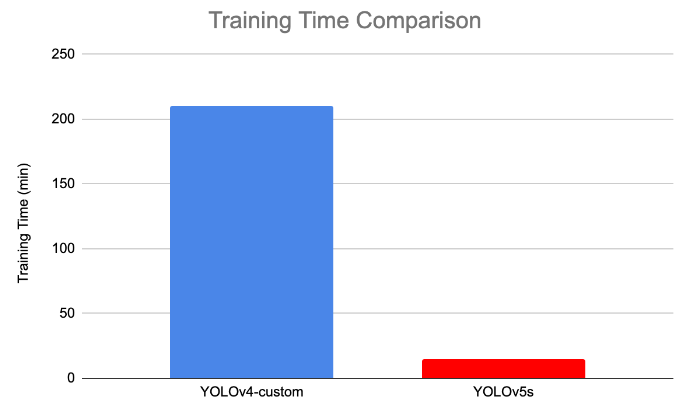
實驗結果
跟YOLOv4訓練速度相比。
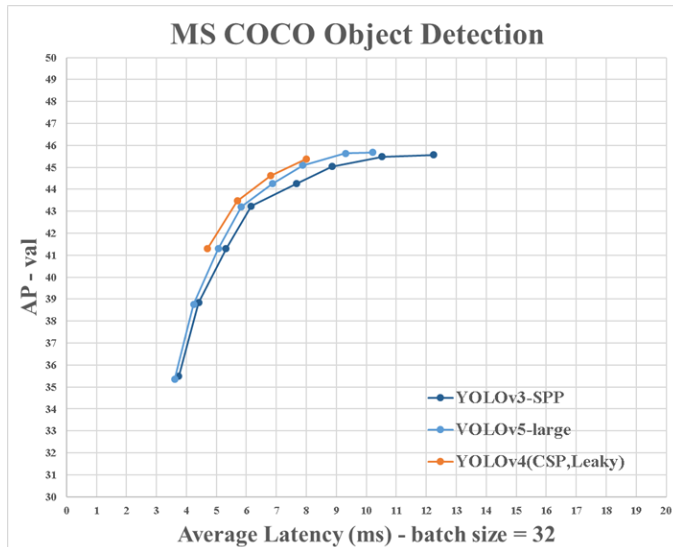
驗證結果
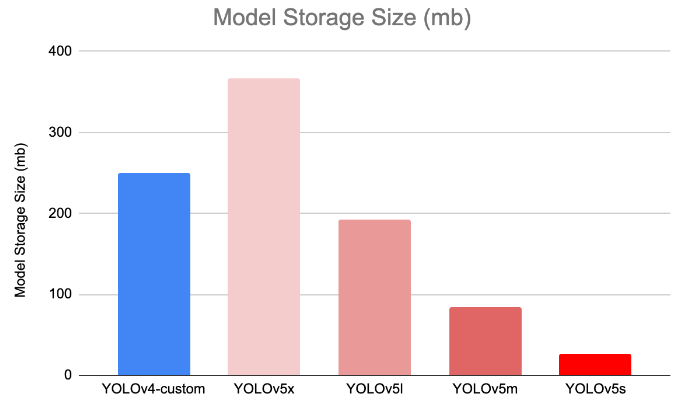
模型的大小
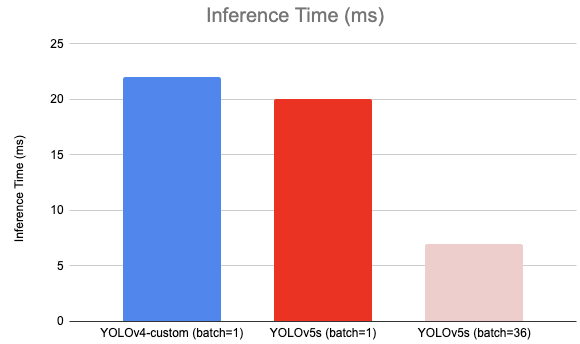
Inference所花費的時間
文章使用之圖片擷取自YOLOv5官方網站
參考文獻
YOLOv5的AutoAnchor如何實現
混合精度對訓練產生的影響
YOLOv5 NMS改成DIOU-NMS
留言
追蹤
檢舉
上一篇
[DAY 7] YOLOv5-上篇
下一篇
[DAY 9] PP-YOLO
系列文
YOLO系列網路技術採用以及實作
共
30
篇
目錄
RSS系列文
訂閱系列文
11
人訂閱
26
[DAY 26] YOLOv8模型訓練
27
[DAY 27] 訓練資料前處理(補充)
28
[DAY 28] 訓練資料擴充(補充)
29
[DAY 29] 模型訓練結果
30
[DAY 30] 完賽心得
完整目錄
熱門推薦
{{ item.subject }}
{{ item.channelVendor }}
|
{{ item.webinarstarted }}
|
{{ formatDate(item.duration) }}
直播中
立即報名
尚未有邦友留言
立即登入留言
iThome鐵人賽
參賽組數
126
組
團體組數
5
組
累計文章數
285
篇
最後報名日
9/15
看影片追技術
看更多
{{ item.subject }}
{{ item.channelVendor }}
|
{{ formatDate(item.duration) }}
直播中
熱門tag
15th鐵人賽
16th鐵人賽
13th鐵人賽
14th鐵人賽
17th鐵人賽
12th鐵人賽
11th鐵人賽
鐵人賽
2019鐵人賽
javascript
2018鐵人賽
python
2017鐵人賽
windows
php
c#
linux
windows server
css
react
熱門問題
ChatGPT Business & Codex 如何從零開始?
CODEX 桌面版本app重啟後分頁老是消失 (為什麼)
如何使用AD伺服器的GPO派送執行弱掃軟體
熱門回答
ChatGPT Business & Codex 如何從零開始?
熱門文章
Day 01 - Claude Code 其實就只是一個 while 迴圈
Day1: 為什麼現在是不寫程式的測試人員學自動化的最好時機
Day2: 第一個測試:一句話生出會跑的 Playwright 測試
LINE 廣告的相關 Domain List IP 位址,阻擋LINE的廣告
從偵察到免費機票:針對 AI 代理的精準提示詞攻擊
IT邦幫忙
×
標記使用者
輸入對方的帳號或暱稱
Loading
找不到結果。
標記
{{ result.label }}
{{ result.account }}

 Classes Loss:用來計算分類錯誤(採用Binary Cross Entropy Loss)。
Classes Loss:用來計算分類錯誤(採用Binary Cross Entropy Loss)。 Objectness Loss:物件是否在該Grid Cell當中(同樣採用Binary Cross Entropy Loss)。
Objectness Loss:物件是否在該Grid Cell當中(同樣採用Binary Cross Entropy Loss)。

 Location Loss: 計算物件的位置(C-IOU)。
Location Loss: 計算物件的位置(C-IOU)。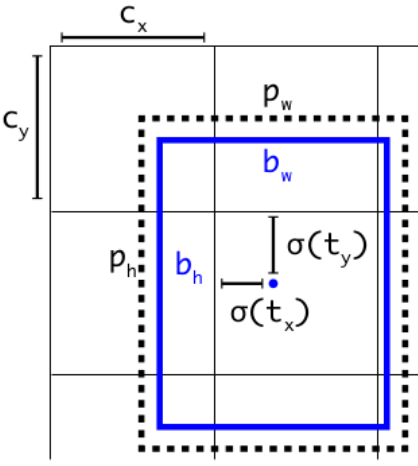







 iThome鐵人賽
iThome鐵人賽